Description
Ding dong! Hear that? It’s the PiCowbell ringing, letting you know that the new Adafruit PiCowbell CAN Bus is in stock and ready to assist your Raspberry Pi Pico and Pico W projects connect to CAN bus networks for automotive or robotics projects.
CAN Bus is a small-scale networking standard, originally designed for cars and busses, but now widely used for robotics or sensor networks that require better range and addressing than I2C, without the need for Ethernet pins or complexity. CAN uses 2 wire differential signaling, making it robust for long distances and noisy environments.
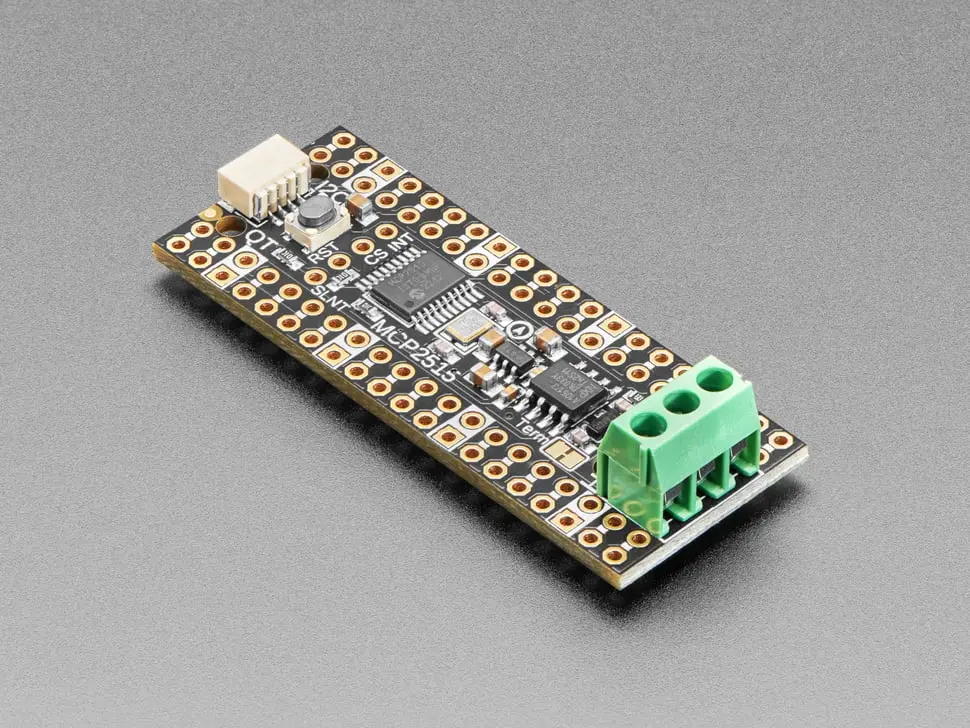
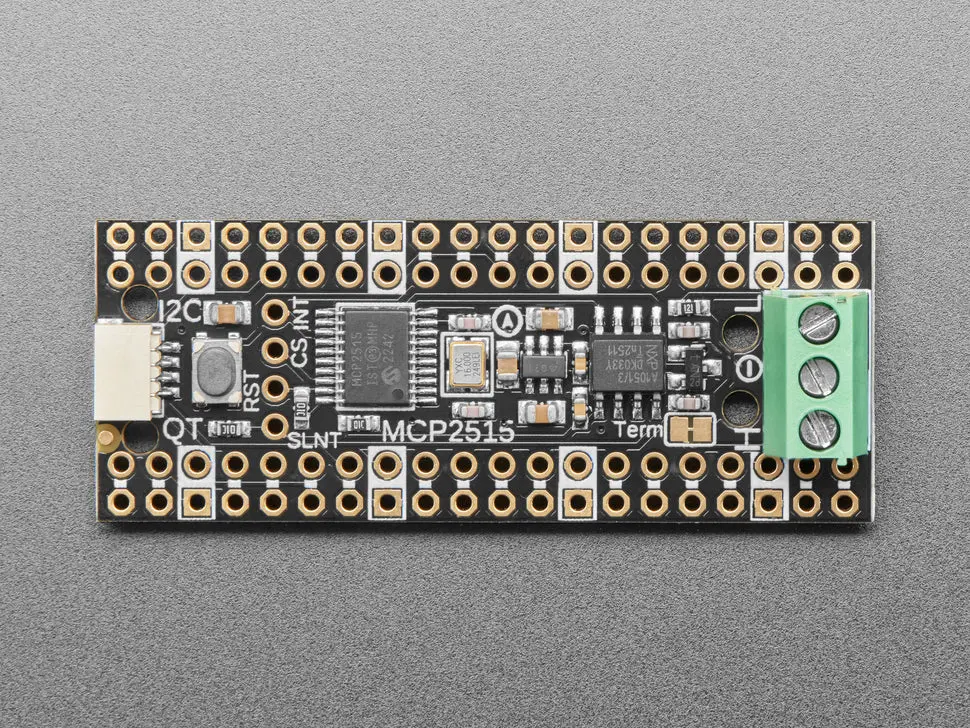
This board features the MCP2515 controller, a popular and well-supported chipset with drivers for Arduino and CircuitPython. It supports SPI communication and can send and receive messages at up to 1 Mbps in standard or extended format.
Key enhancements include:
- 5V charge-pump voltage generator for clean 5V supply necessary for the transceiver.
- 3.5mm pre-soldered terminal block for easy High, Low, and Ground connections.
- Onboard 120-ohm termination resistor that can be removed by cutting a jumper.
- Pre-connected CS and INT pins on Pico GPIO #20 and #21, with breakout pads for alternate pin usage.
Includes assembled PCB and header (header requires soldering).
Additional features:
- Right angle JST SH connector for I2C / Stemma QT / Qwiic connection (3V, GND, IO4 (SDA), and IO5 (SCL)).
- Reset button to restart your program.
- Duplicate hole pads for solder-jumpering, ground pad markings, and gold-plated solder pads for ease of assembly.
See Adafruit PiCowbell CAN Bus for Pico guide for detailed instructions.
Explore more from our collection.

Reviews
There are no reviews yet.